


































Table of Contents
의존성 정의하기
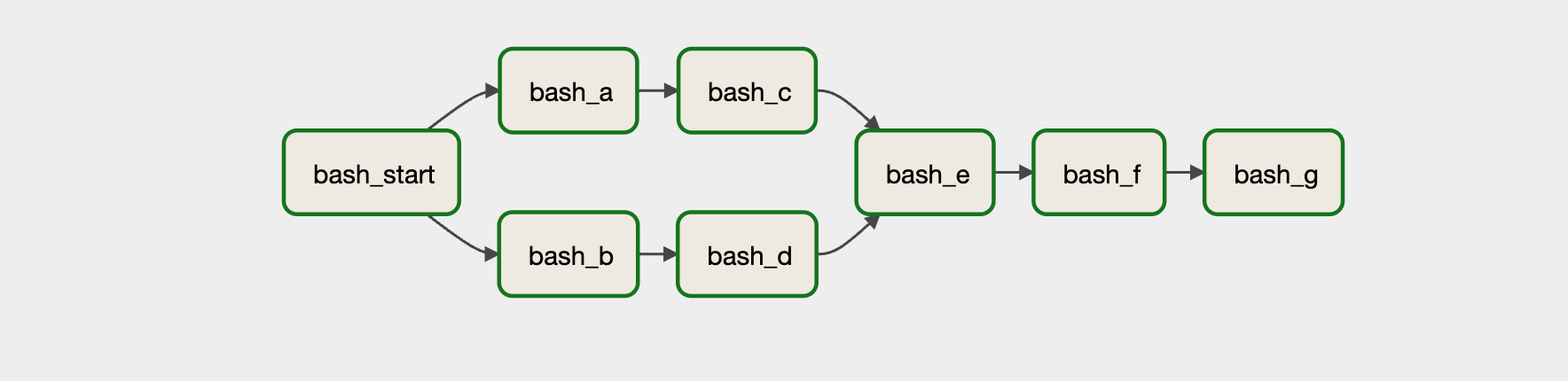
# in general we recommend you use the bitshift operators, as they are easier to read in most cases
bash_start >> [bash_a, bash_b]
bash_a >> bash_c
bash_b >> bash_d
[bash_c, bash_d] >> bash_e
bash_e >> bash_f >> bash_g
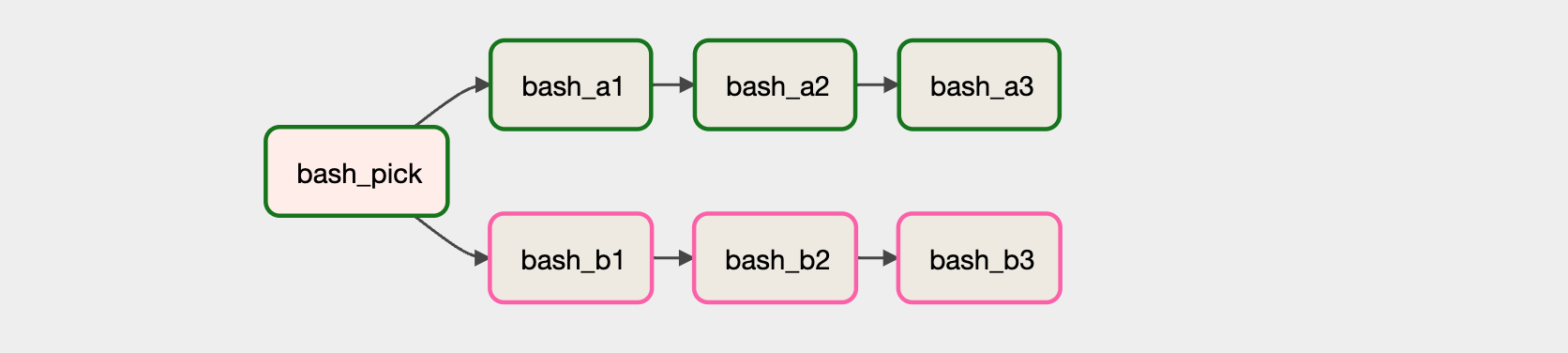
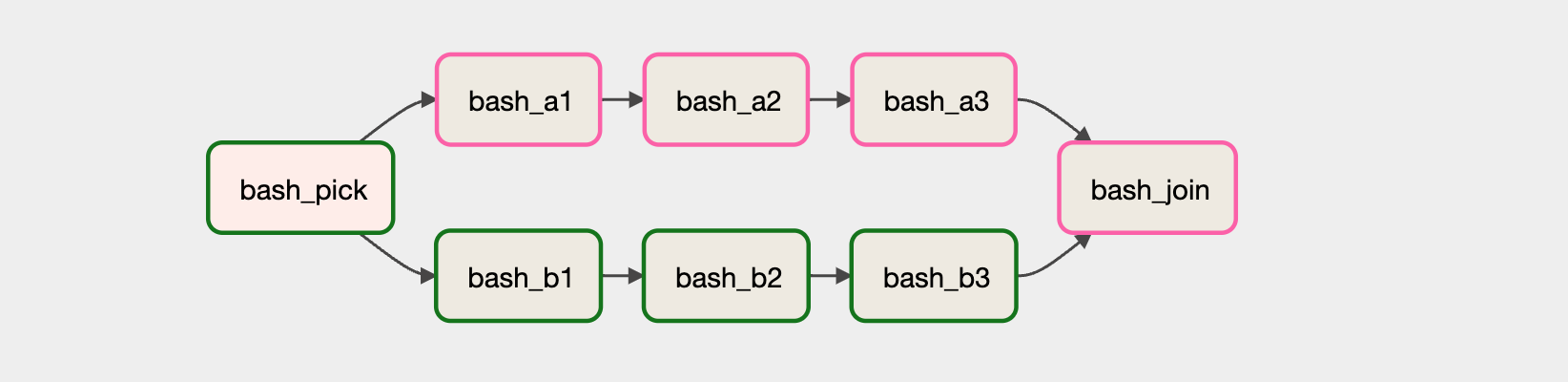
브랜치 하기
import random
from datetime import datetime
from airflow import DAG
from airflow.operators.bash import BashOperator
from airflow.operators.python import BranchPythonOperator
def _pick_erp_system():
x = random.randint(1, 2)
if x % 2 == 0:
return "bash_a1" # 리턴할 태스크 ID. 리스트를 넘기면 여러 개의 태스크를 실행할 수도 있다
else:
return "bash_b1"
with DAG(
dag_id="test_airflow",
schedule_interval="* * * * *", # 매분마다 실행
start_date=datetime(2023, 1, 15),
catchup=False
) as dag:
bash_pick = BranchPythonOperator( # BranchPythonOperator 사용ㄷ
task_id="bash_pick",
python_callable=_pick_erp_system
)
bash_a1 = BashOperator(
task_id="bash_a1",
bash_command="echo A1"
)
bash_b1 = BashOperator(
task_id="bash_b1",
bash_command="echo B1"
)
bash_a2 = BashOperator(
task_id="bash_a2",
bash_command="echo A2"
)
bash_b2 = BashOperator(
task_id="bash_b2",
bash_command="echo B2"
)
bash_a3 = BashOperator(
task_id="bash_a3",
bash_command="echo A3"
)
bash_b3 = BashOperator(
task_id="bash_b3",
bash_command="echo B3"
)
bash_pick >> [bash_a1, bash_b1]
bash_a1 >> bash_a2 >> bash_a3
bash_b1 >> bash_b2 >> bash_b3
태스크 트리거
- 업스트림 태스크가 어떤 상태일 때 태스크가 실행되도록 할지 결정한다
- 디폴트는
all_success로, 업스트림 태스크가 모두 성공했을 때 실행된다
| 트리거 규칙 | 동작 | 사용 사례 |
|---|---|---|
| all_success | 모든 상위 태스크가 성공하면 트리거 된다 | 일반적인 워크플로에 대한 기본 트리거 규칙 |
| all_failed | 모든 상위 태스크가 실패했거나, 오류가 발생한 경우 트리거 된다 | 오류를 처리하는 태스크의 트리거 규칙 |
| all_done | 결과 상태에 관계없이 모든 부모가 실행을 완료하면 트리거 된다 | 시스템 종료 또는 클러스터 중지하는 태스크의 트리거 규칙 |
| one_success | 한 부모가 성공하자마자 트리거 된다 | |
| one_failed | 하나 이상의 상위 태스크가 실패하자마자 트리거 된다 | 알림 또는 롤백과 같은 일부 오류 처리 태스크의 트리거 규칙 |
| none_failed | 실패한 태스크 없이, 모든 상위 태스크가 성공 또는 건너뛴 경우 트리거 된다 | 스킵된 태스크와 성공한 태스크를 결합한 태스크의 트리거 규칙 |
| none_skipped | 스킵한 태스크 없이, 모든 상위 태스크가 성공 또는 실패한 경우 트리거 된다 | |
| dummy | 업스트림 태스크의 상태와 관계없이 트리거 된다 | 테스트 용도 |
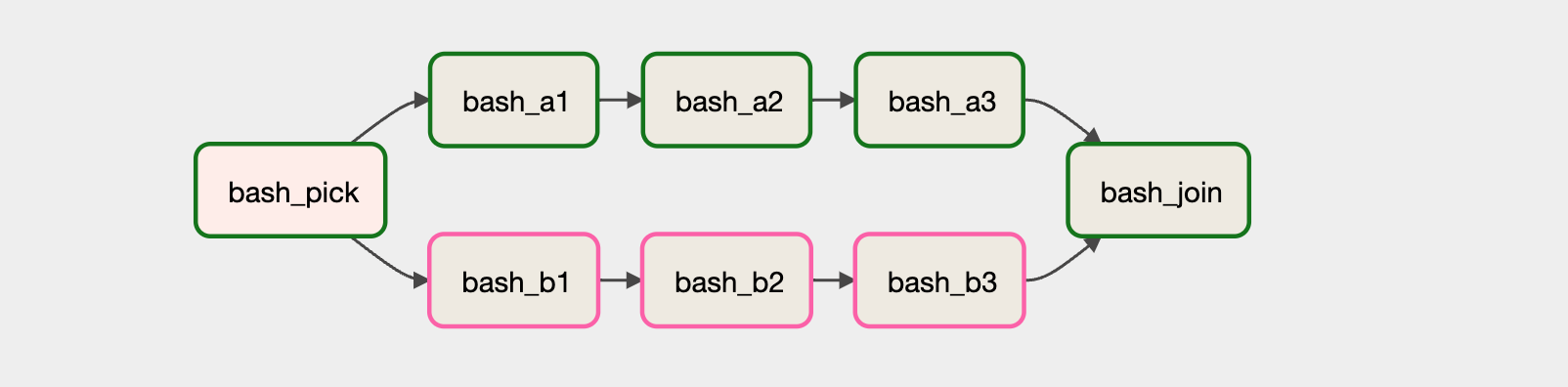
bash_join = BashOperator(
task_id="bash_join",
bash_command="echo JOIN",
trigger_rule="none_failed"
)
bash_join = BashOperator(
task_id="bash_join",
bash_command="echo JOIN",
trigger_rule="none_skipped"
)
워크플로 트리거
- 센서를 이용하면, 고정된 스케줄링 방식이 아닌 특정 이벤트로 파이프라인을 트리거 할 수도 있다
- ex. 새로운 데이터가 도착, 공유 드라이브에 파일이 업로드, 코드를 리포지터리로 푸시, Hive 테이블에 파티션이 있을 때와 같은 경우
- 센서는 오퍼레이터의 특수 타입(서브클래스)
- 센서는 특정 조건이 True인지 지속적으로 확인하고, True이면 태스크가 성공한 것으로 간주된다. False이면 True 또는 타임아웃이 될 때까지 확인
from airflow.sensors.filesystem import FileSensor
wait_for_data = FileSensor(
task_id="wait_for_data",
filepath="/data/data.csv",
)
from pathlib import Path
from airflow.sensors.python import PythonSensor
def _wait_for_data():
data_path = Path("/data/data.csv")
return data_path
wait_for_data = PythonSensor(
task_id="wait_for_data",
python_callable=_wait_for_data
)